Инженеры научили робопса точно отдавать пас в футболе
Механизм успешно себя показал в серии реальных испытаний.
Исследователи разработали иерархическую структуру обучения с подкреплением для повышения точности четвероногих роботов в футбольных бросках. О разработке сообщает Tech Xplore.
Инженеры из Калифорнийского университета в Беркли (UC Berkeley), университетов Монреаля и Мила разработали систему машинного обучения с подкреплением для обучения роботизированных устройств точно передавать мяч во время игры в футбол.
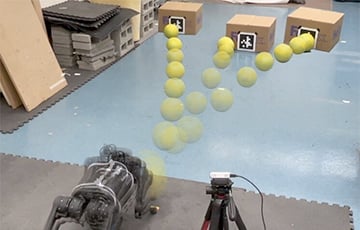
 Система определяет потенциальную цель. Изображение: Ji et al., ArXiv
Система определяет потенциальную цель. Изображение: Ji et al., ArXiv Последние достижения в области робототехники позволили создать более надежное оборудование и усовершенствованные алгоритмы управления роботами, отмечают авторы работы. В результате механические устройства стали более гибкими и потенциально могут решать сложные задачи, в том числе, например, играть в футбол вместе с людьми.
Решение, предложенное инженерами, объединяет два ключевых компонента: управление движениями и планирование движения. Первый из них отслеживает траекторию движения пальца ноги, бьющей по мячу, а второй — выбирает оптимальную траекторию зацепа для броска близлежащего футбольного мяча (обнаруженного внешней камерой) в заданное место.
Исследователи отмечают, что реализованный подход позволяет разделить сложную задачу на два компонента: контроль и планирование. Благодаря этому можно сначала обучить робота выполнять правильные движения «в вакууме», отработав технику контроля, а затем переходить к реальным испытаниям и дообучать сеть в процессе игры.
Ученые протестировали свою модель в серии реальных испытаний, используя четвероногого робота A1. Они обнаружили, что при использовании нового подхода точность движений значительно повышается. Это очень сложная задача, так как робот должен быстро махать ногой и набирать обороты, не теряя равновесия, добавляют они.
Исследователи отмечают, что такая техника обучения подойдет не только для игры в футбол, но и для выполнения других задач, в которых роботы взаимодействуют с мягкими объектами.




 13.01.2025
В Беларуси на три года продлили упрощенный порядок приемки домов, построенных без разрешения
13.01.2025
В Беларуси на три года продлили упрощенный порядок приемки домов, построенных без разрешения










Новости и события в Беларуси и мире.
Пресс-центр [email protected]