Создан робот, который распадается на капли и собирается снова
Он управляется с помощью внешних магнитов.
Группа исследователей из Университета Сучжоу, вместе с коллегами из Института интеллектуальных систем Макса Планка и Харбинского технологического института, разработала новый тип мягкого робота, который можно разделить на более мелкие компоненты, чтобы он просочился сквозь узкие каналы, а затем его можно снова собрать, пишет techinsider.
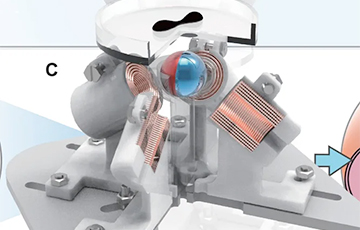
Исследователи сделали роботов из суспензии: наночастицы оксида железа в прозрачном масле. Робот управляется с помощью внешних магнитов.
Исследователи отмечают, что использование робота, сделанного из материала, который очень слабо скрепляется, позволяет изменять его форму по требованию. Прикладывая несколько магнитных полей, ученые показали, что можно проводить робота через лабиринт, время от времени меняя его форму для прохождения сквозь узкие каналы. Робота можно разделять на нужное количество более мелких частей-капель, чтобы они просочились сквозь пористый материал. Робот затем легко собирается в единую круглую форму и продолжает свое путь. Ученые отмечают, что такой робот может быть выполнен в самых разных масштабах.
Предполагается, что робот может быть использован в медицинских целях в качестве средства доставки лекарств к труднодоступным частям тела через кровеносную систему, например, в легкие или даже головной мозг.
Исследователи согласны, что для практического применения робота необходимо усовершенствовать. Самым сложным элементом системы является магнитное управление, которое нужно сделать гораздо более точным и гибким. Но уже видны многие варианты применения. Это например, доставка химических веществ необходимых при реакциях.














Новости и события в Беларуси и мире.
Пресс-центр [email protected]